1个月前,哈佛大学研发的跳蚤跳跃机器人,因23倍体长跳跃比登上Science官网头条,该研究成果的相关论文发表在《Science Robotics》杂志上,引发业界关注。
Science官网头条截屏
业界认为,这款高性能弹跳机器人解决了NASA(美国航空航天局)火星探测器遇到传统行走机器人越障能力差的难题,将在太空探险探测勘探环节发挥重要作用。
潮新闻记者刚刚获悉,由金华职业技术大学智能制造学院王振阳、金正浩、范勇超、朱奕然、傅佳豪五位同学组成的团队,耗时两年共同研发的高性能仿生跳跃机器人,以超60倍体长跳跃比超越哈佛大学研发团队的“跳蚤”,据2024年11月科技查新报告显示,其“跳跃性能位居全球前列”。

金华职大团队研发的高性能仿生跳跃机器人。受访者供图
金华职大团队研发的高性能仿生跳跃机器人以青蛙为原型,长98毫米,宽50毫米,高62毫米,最小的零部件需要精确到0.1毫米的误差之内。
“当前各国太空探险相互制衡,竞争白热化,即便是机器人技术全国排名第一的哈尔滨工业大学,目前研发的跳跃机器人跳远距离也不足自身体长的20倍。”团队负责人王振阳同学介绍,他们基于青蛙跳跃机理研发的超高性能仿生跳跃机器人,可以实现全自动储能跳跃、落地扶正等功能,目前正在新材料、储能系统等领域申请6项发明专利。

国内外弹跳机器人的跳跃性能对比(不包含非完整跳跃机器人的数据)
王振阳从小热爱航空航天事业,初中就参加了宁波市科协举办的航模比赛并获得一等奖。
上大学后,他偶然间读到一篇NASA的跳跃机器人论文,就想着为中国航空航天事业做点事情。他加入由金职大智能制造学院党委副书记(主持)、副院长黄鹏程领衔的“机器人加工与装备技术”实验室,并与一群志同道合的同学组建了“跳远高手”团队。
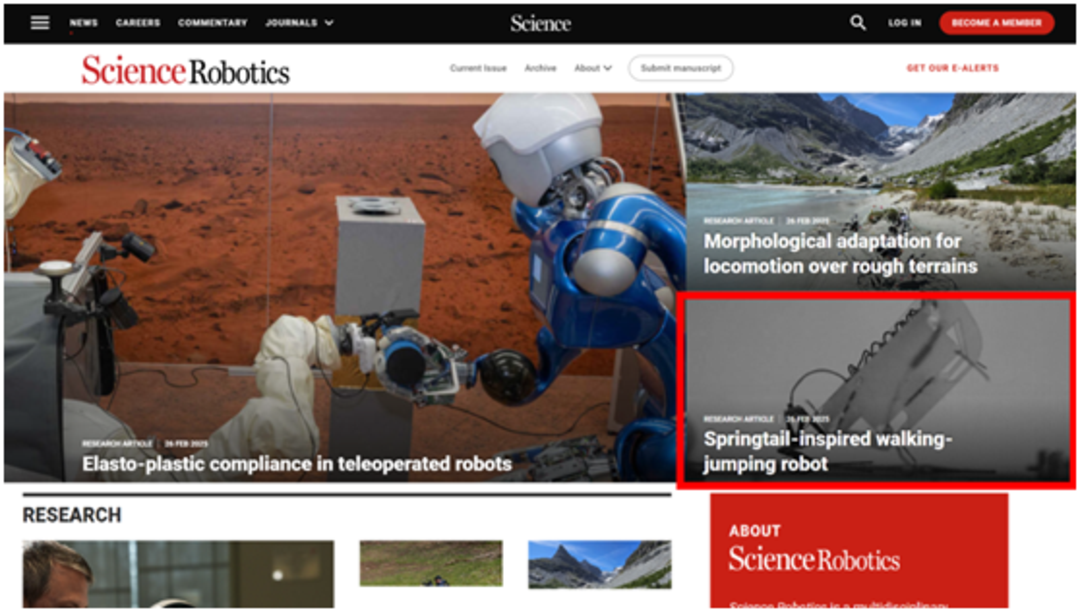
“起初,我们并没有清晰的思路,于是将国内外弹跳机器人的跳跃性能进行对比,最终确定了先部分后整体的研发方向。”王振阳介绍,他和团队成员将这款高性能仿生跳跃机器人分为驱动、传动、储能、释放、前腿、后腿等6个部分,先将每个部分做精做细,然后再进行组合测试,“我们的设计草图达400多页,完成了22次迭代升级,实验损耗电机200余个,建模测试达10万余次”。
金华职大团队高性能仿生跳跃机器人的研发图纸
团队成员朱奕然透露,他们还运用蒙特卡罗空间算法,求解跳跃轨迹分布变化;通过设置11个不同的重心坐标,得出最佳跳跃重心;建立后腿参数化运动模型,得到256个仿真结果,最终确定最佳跳跃性能的后腿结构参数。
去年7月,团队在高性能仿生跳跃机器人尚未完全成熟的情况下,参加第十一届全国大学生机械创新设计大赛,与国内众多双一流高校同台竞技,最终打败哈工大、国防科大、上海交大等名校战队,获得第一名。
主攻智能化装备设计与制造、超精密加工、工业特种机器人的浙江工业大学博士生导师曾晰教授评价说:“该团队研发的仿生跳跃机器人以生物力学为理论基石,充分解耦蛙类跳跃运动中的肌肉骨骼协同机制,相关指标居国际同类研究前列。这一成果不仅代表大学生科技创新能力的突破性进展,更彰显了我国高等工程教育改革的显著成效。”


金华职大团队在研发高性能仿生跳跃机器人。学校供图
目前,王振阳正领衔团队成员撰写论文,希望向全世界介绍来自浙江金华的青年强音。王振阳说:“我们也希望能与国内科研院所合作,将这款高性能仿生跳跃机器人再升级,让它跳上太空,为国家航空航天事业贡献力量。”
来源:潮新闻
相关推荐